Principles of fin and flipper locomotion on granular media:
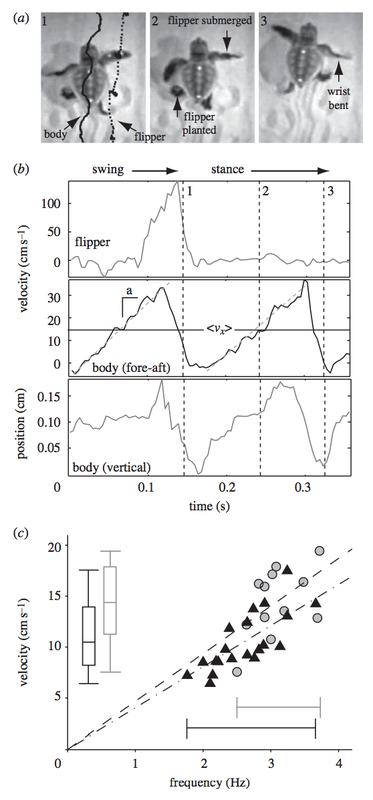
Biological terrestrial locomotion occurs on substrate materials with a range of rheological behavior, which can affect limb-ground interaction, locomotor mode, and performance. Surfaces like sand, a granular medium, can display solid or fluid-like in response to stress. Based on our previous experiments and models of a robot moving on granular media, we hypothesize that solidification properties of granular media allow organisms to achieve performance on sand comparable to that on hard ground. We test this hypothesis by performing a field study examining locomotor performance (average speed) of an animal that can both swim aquatically and move on land, the hatchling Loggerhead sea turtle (Caretta caretta). Hatchlings were challenged to traverse a trackway with two surface treatments: hard ground (sandpaper) and loosely packed sand. On hard ground, the claw use enables no-slip loco- motion. Comparable performance on sand was achieved by creation of a solid region behind the flipper that prevents slipping. Yielding forces measured in laboratory drag experiments were sufficient to support the inertial forces at each step, consistent with our solidification hypothesis.
Kinematic study with bio-inspired sea turtle robot:
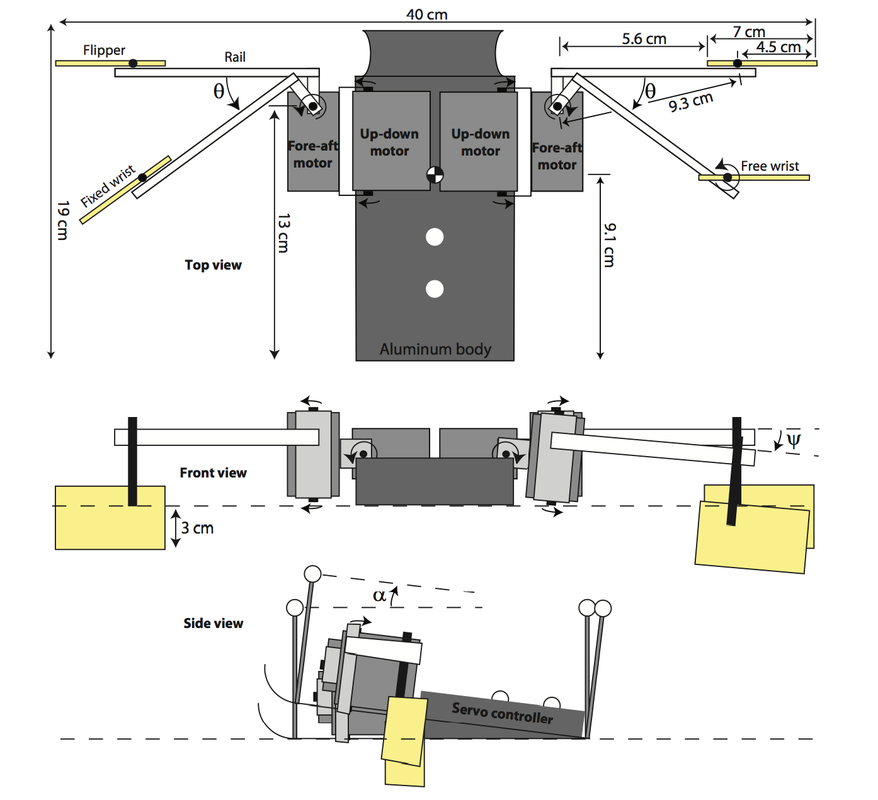
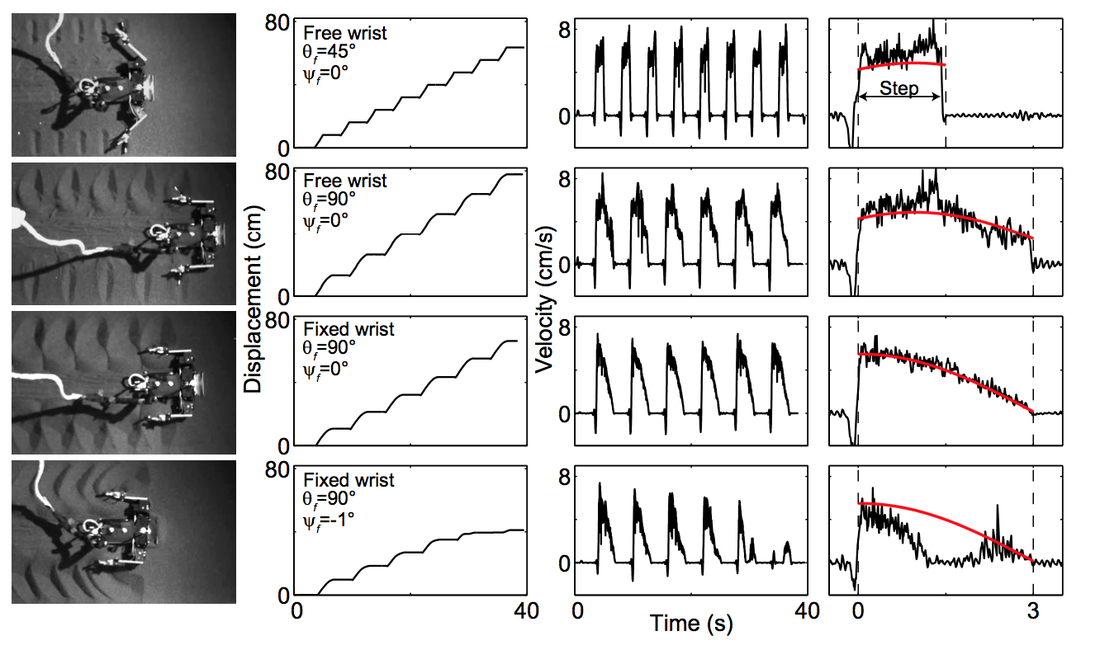
To discover principles of flipper-based terrestrial locomotion we study the mechanics of a hatchling sea turtle-inspired robot, FlipperBot (FBot), during quasi-static movement on granular media. FBot implements a symmetric gait using two, servo-motor driven front limbs with flat-plate flippers and either freely rotating or fixed wrist joints. For a range of gaits, FBot moves with constant step length. However, for gaits with sufficiently shallow flipper penetration or sufficiently large stroke, per step displacement decreases with each successive step resulting in failure (zero forward displacement) within a few steps. The biologically inspired free wrist is less prone to failure than the fixed wrist. For the fixed wrist, failure occurs when FBot interacts with ground disturbed during previous steps, and measurements reveal that flipper generated forces decrease as per step displacement decreases. In the constant step length regime, kinematic and force based models predict FBot’s motion for free and fixed wrist configurations, respectively, and, when combined with force measurements, models and experiments both provide insight into how disturbed ground leads to locomotory failure.
Effects of granular incline angle on the loggerhead sea turtle hatchling (Caretta caretta) locomotion in the field:
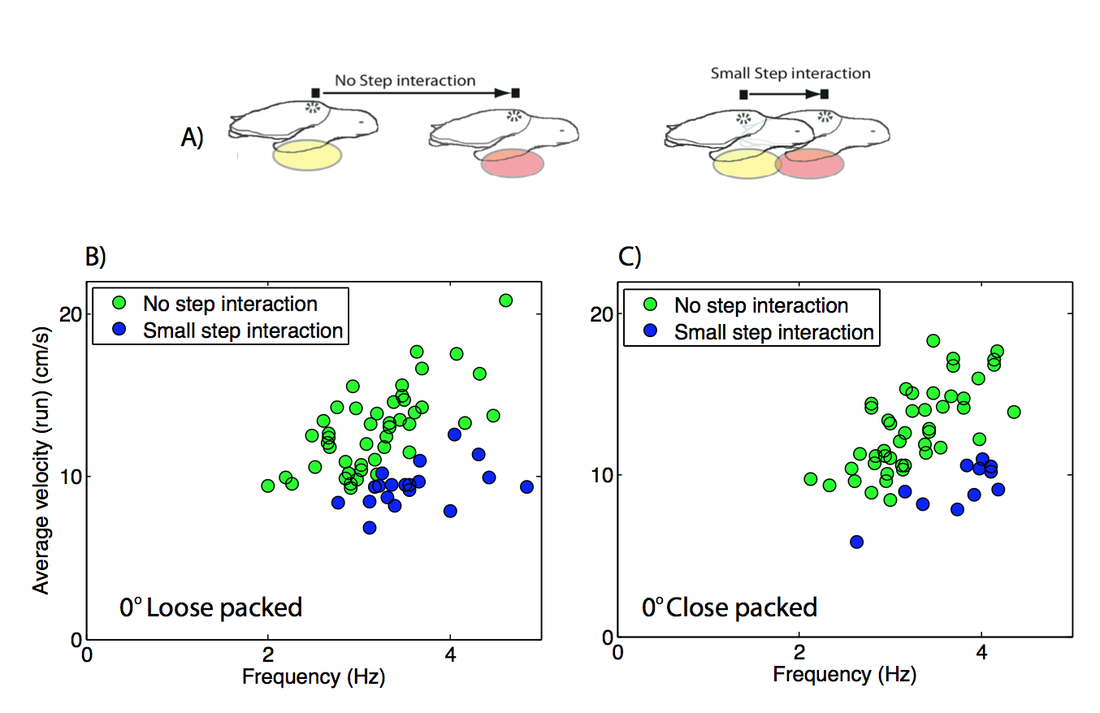
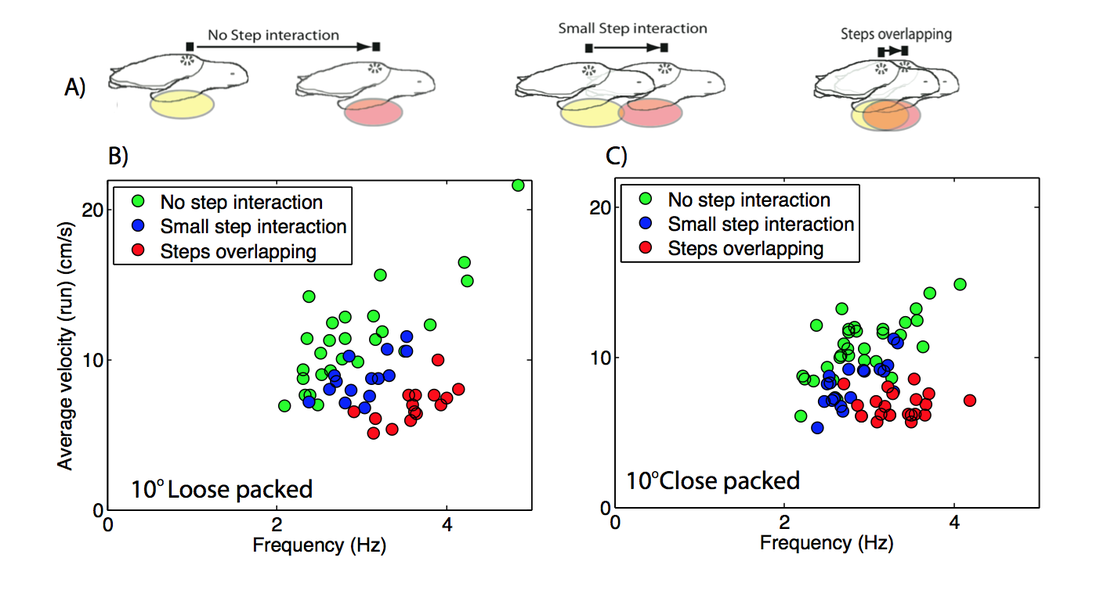
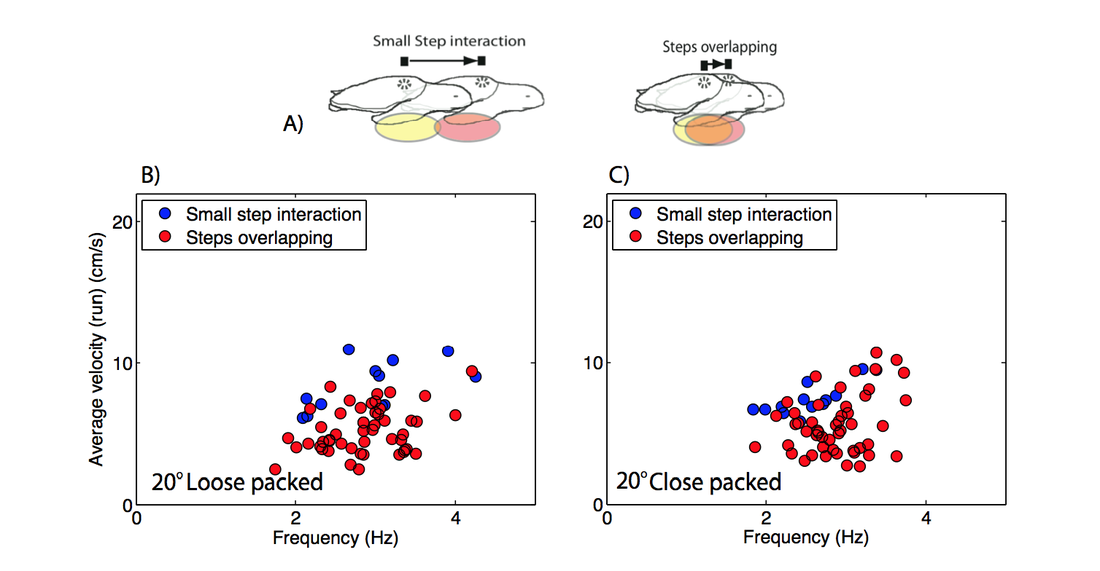
Natural environments are complex with animals running over difficult substrates to ensure survival. Animals that traverse on granular substrates can experience slipping, which de- creases their performance, since granular media can act as a solid or a fluid when stress is applied. Kinematics of loggerhead sea turtle hatchlings (Caretta caretta) reveal that limb use varies significantly depending on granular compaction. These studies are done on level ground. However, on sandy beaches hatchlings rarely encounter level ground, having to crawl up and down sandy slopes. As sand is tilted it approaches a critical incline value (angle of repose) at which the material will cease to act as a solid and start to flow. Depending on substrate particle properties the angle at which flow is induced varies. Little is known how legged intruders are affected by sandy inclines.
We are interested in investigating the effects of granular inclines on the locomotor per- formance of hatchling sea turtles, hypothesizing that as incline angle increases the animals will adjust limb-ground interactions to prevent slipping, which negatively affects their per- formance (speed). We capture 25 hatchlings from 5 different nests on our field site on Jekyll Island, GA testing them on loose and hard packed sand, and on inclines of θ= 0◦, θ= 10◦ and θ= 20◦
We are interested in investigating the effects of granular inclines on the locomotor per- formance of hatchling sea turtles, hypothesizing that as incline angle increases the animals will adjust limb-ground interactions to prevent slipping, which negatively affects their per- formance (speed). We capture 25 hatchlings from 5 different nests on our field site on Jekyll Island, GA testing them on loose and hard packed sand, and on inclines of θ= 0◦, θ= 10◦ and θ= 20◦